
Produktet

paletizues automatik i dorezës së kutisë së kartonit
Përshkrimi i shkurtër:
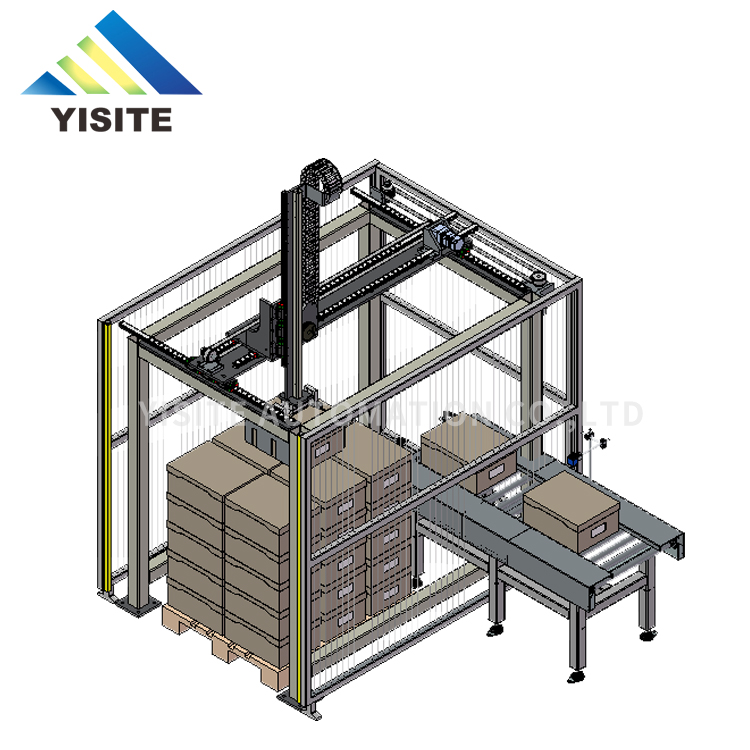
Prezantimi i produktit të paletizuesit automatik me këmishë kartoni: Njësia kryesore e paletizuesit përbëhet nga një karrocë që mund të udhëtojë përpara dhe prapa, një kornizë dhe një platformë mbajtëse që mund të ngrihet lart e poshtë. Madhësia dhe fiksimi mund të personalizohen.
Paletizuesi automatik i dorezës së kutisë së kartonit është me një dizajn të veçantë të dorezës pneumatike, presioni i rregullueshëm, i pajisur me valvul tampon presioni, në mënyrë që veprimi i kapjes i pajisur me mekanizëm induksioni, të mund të perceptojë automatikisht objektin dhe të informojë qendrën e kontrollit për kapjen e objektit.

rreth nesh

Ne jemi një prodhues profesional i pajisjeve të automatizimit të personalizuar. Produktet tona përfshijnë paletizuesin, makinën e paketimit të marrjes dhe vendosjes, paletizuesin, aplikimin e integrimit të robotëve, manipuluesit e ngarkimit dhe shkarkimit, formimin e kartonit, vulosjen e kartonit, shpërndarësin e paletave, makinën ambalazhuese dhe zgjidhje të tjera automatizimi për linjën e prodhimit të paketimit në fund.
Zona jonë e fabrikës është rreth 3500 metra katrorë. Ekipi kryesor teknik ka një përvojë mesatare prej 5-10 vjetësh në automatizimin mekanik, duke përfshirë 2 inxhinierë të projektimit mekanik. 1 inxhinier programimi, 8 punëtorë montimi, 4 persona korrigjues pas shitjes dhe 10 punëtorë të tjerë
Parimi ynë është "klienti i pari, cilësia në radhë të parë, reputacioni i pari", ne gjithmonë i ndihmojmë klientët tanë "të rrisin kapacitetin e prodhimit, të ulin kostot dhe të përmirësojnë cilësinë" ne përpiqemi të bëhemi një furnizues kryesor në industrinë e automatizimit të makinerive.
Trass XYZ manipulator plotësisht automatik për grumbullimin e kartonit
1. Përbërja e makinës staker
Makina paletizuese përbëhet nga korniza e instalimit, sistemi i pozicionimit, sistemi i servo drive, sistemi i kontrollit, sistemi elektrik i kontrollit dhe shpërndarjes, pajisja mbrojtëse e sigurisë, etj., e pajisur me sistem automatik të pozicionimit të ushqimit.
2. Raft montimi i makinës së stivimit
Për shkak se shpejtësia e lëvizjes së stivuesit është shumë e shpejtë, gjendja e fillimit ka një ndikim të madh në kornizën e montimit. Korniza e instalimit duhet të jetë shumë e ngurtë për të siguruar funksionimin e qëndrueshëm të stivimit, kështu që ne kemi projektuar strukturën e kornizës prej çeliku të salduar si korniza mbështetëse.
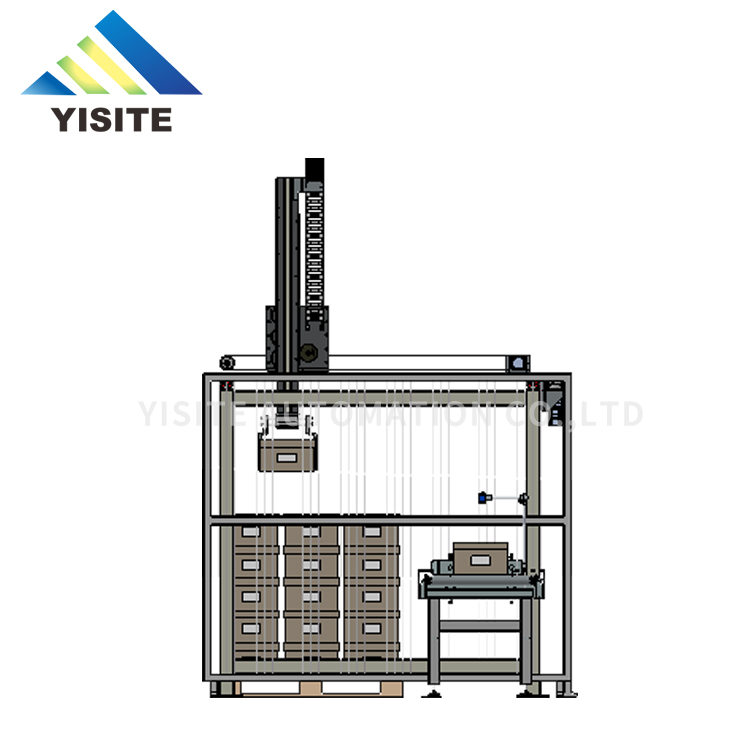
3. Sistemi i pozicionimit të makinës së paletizuesit stacker
Sistemi i pozicionimit të stackerit është thelbi i të gjithë pajisjes, është produkt i kompanisë Yaskawa (Japoni), shpejtësia e shpejtë e lëvizjes dhe saktësia e përsëritjes është e lartë, tre koordinata X, Y, Z janë zgjedhur për transmetimin sinkron të rripit të dhëmbëve, koordinata e vetme saktësia e pozicionimit të përsëritur është 0,1 mm, shpejtësia e lëvizjes së shpejtë të linjës: 1000 mm/s. Aksi X është një sistem i vetëm pozicionimi me një gjatësi të vetme prej 3000 mm dhe një hapësirë prej 1935 mm. Transmetuesi sinkron siguron lëvizjen sinkrone të dy sistemeve të pozicionimit dhe drejtohet nga një servo motor 1500W. Për të përputhur çift rrotullues dhe inercinë lëvizëse, ekziston një reduktues ingranazhesh planetare me precizion të lartë.
Boshti Y duke përdorur një sistem pozicionimi të dyfishtë. Arsyeja pse njësia e pozicionimit me një seksion kryq kaq të madh është kryesisht sepse boshti Y është një mbështetje me dy skaje me strukturën e mesme të pezullimit. Nëse seksioni kryq i zgjedhur nuk është i mjaftueshëm, qëndrueshmëria e lëvizjes së robotit nuk do të garantohet dhe roboti do të dridhet kur lëviz me shpejtësi të lartë. Dy njësi pozicionimi përdoren krah për krah për të fiksuar boshtin Z në mes dhe për të balancuar ngarkesën mirë. Ky modalitet instalimi ka stabilitet shumë të mirë. Dy sistemet e pozicionimit drejtohen nga një servo motor 1500 W, i pajisur me një reduktues ingranazhesh planetare me precizion të lartë për përputhjen e çift rrotullimit të lëvizjes dhe inercisë.
Sistemi i pozicionimit të boshtit Z është i fortë dhe i qëndrueshëm. Produkti në përgjithësi ka fiksimin e rrëshqitësit dhe lëvizjen e përgjithshme lart e poshtë. Servo motori duhet të përmirësojë shpejt objektin, i cili duhet të kapërcejë gravitetin e madh dhe forcën e nxitimit dhe ka nevojë për fuqi më të madhe .Në praktikë, ne zgjodhëm një servo motor 2000W, të pajisur me një reduktues ingranazhesh planetare me precizion të lartë. Boshti A është boshti i rrotullimit.
4. Sistemi Servo drive
Makina manipuluese e stivimit duke përdorur servo motor me funksion dixhital. Çdo bosht motori është i pajisur me një servo motor dhe një reduktues, katër servo motor dhe katër reduktues, duke përfshirë motorin vertikal me servo motor bllokues.
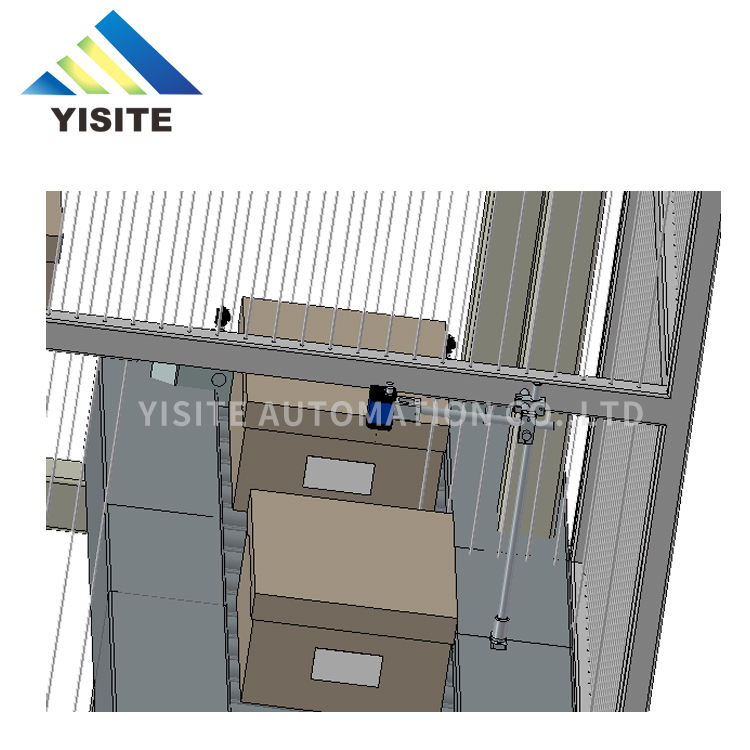
5. Kapje stacker
Stacking me një dizajn të veçantë të rrokjes pneumatike, presioni i rregullueshëm, i pajisur me valvul tampon presioni, në mënyrë që veprimi i kapjes i pajisur me mekanizëm induksioni, mund të perceptojë automatikisht objektin dhe të informojë qendrën e kontrollit për kapjen e objektit.
6, sistemi i kontrollit
Sistemi i kontrollit përbëhet nga një PLC i madh dhe një ekran me prekje. Sistemi ka aftësi të fuqishme programimi. Me modele të ndryshme paletizimi, sistemi mund të paracaktojë një sërë programesh artifakte dhe për të zëvendësuar programin përkatës mund të përdoret në ekranin me prekje.
7, pajisje sigurie
Makina ka një funksion të paralajmërimit dhe alarmit të defekteve, dhe çdo defekt mund të pasqyrojë me saktësi vendndodhjen specifike, lehtë dhe shpejt për të eliminuar defektet, kryesisht duke përfshirë: funksionin e mbrojtjes së robotit nga përplasja; zbulimi i instalimit të pjesës së punës në vend; mbrojtje e sigurisë së ekranit të dritës.
Parametrat teknikë
1. Modeli i makinës: YST-MD1500
2. Kapaciteti i grumbullimit: 200-500 kuti / H
3. Korniza: SS41 (trajtim plastik me injeksion çeliku A3) boshti S45C çeliku mbajtës
4. Fuqia: AC, 3 faza, 380V, 9KW 50HZ
5. Konsumi i ajrit: 500 NL / MIN (përdorimi i ajrit: 5-6 kg / cm2)
6. Dimensionet e pajisjes: (L) 3500 mm (W) 2250 mm (H) 2800 mm (varet nga dizajni aktual i paraqitjes)
7. Pesha e pajisjes: 1500 kg


Konfigurimi i avantazhit kryesor
1. Servo motori i markës Yaskawa
2. Reduktues i shpejtësisë së markës së Tajvanit
3. Mitsubishi (Japoni) PLC
4. Kontaktori dhe çelësat do të përdoren në Schneider
5. Sensori fotoelektrik Omron
6. Veprimi i ekranit të kontrollit të ndërfaqes dhe statusi i alarmit dhe funksioni i alarmit
7. Konvertuesi i frekuencës së markës Yaskawa
8. Korniza dhe panelet anësore janë bërë nga çeliku i karbonit
9. Elemente pneumatike Taiwan AirTac
10. Sucker i markës italiane PIAB









